上海四宏電機(jī)有限公司主營(yíng)產(chǎn)品:低壓伺服電機(jī)、交流伺服電機(jī)、步進(jìn)電機(jī)、無刷電機(jī)以及配套驅(qū)動(dòng)器。
南方大區(qū):13482896782
北方大區(qū):18017377875
廣東大區(qū):13061929082
北方大區(qū):18017377875
廣東大區(qū):13061929082
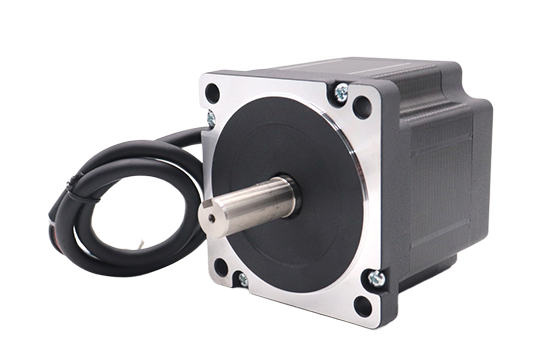
何為步進(jìn)電機(jī),何為步進(jìn)電機(jī)驅(qū)動(dòng)器?步進(jìn)電機(jī)是一種作為控制用的特種電機(jī),它的旋轉(zhuǎn)是以固定的角度(稱為“步距角”)一步一步運(yùn)行的,其特點(diǎn)是沒有積累誤差(精度為100%),所以廣泛應(yīng)用于各種開環(huán)控制。步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào)轉(zhuǎn)化為步進(jìn)電機(jī)的角位移,或者說:控制系統(tǒng)每發(fā)一個(gè)脈沖信號(hào),通過驅(qū)動(dòng)器就使步進(jìn)電機(jī)旋轉(zhuǎn)一步距角。所以步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比。
何為驅(qū)動(dòng)器的細(xì)分?要了解“細(xì)分”,先要弄清“步距角”這個(gè)概念:它表示控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖信號(hào),電機(jī)所轉(zhuǎn)動(dòng)的角度。電機(jī)出廠時(shí)給出了一個(gè)步距角的值,如86BYG250A型電機(jī)給出的值為0.9°/1.8°(表示半步工作時(shí)為0.9°、整步工作時(shí)為1.8°),這個(gè)步距角可以稱之為‘電機(jī)固有步距角’,它不一定是電機(jī)實(shí)際工作時(shí)的真正步距角,真正的步距角和驅(qū)動(dòng)器有關(guān),參見下表(還以型86BYG250A電機(jī)為例):電機(jī)固有步距角所用驅(qū)動(dòng)器類型及工作狀態(tài)電機(jī)運(yùn)行時(shí)的真正步距角0.9°/1.8°驅(qū)動(dòng)器工作在半步狀態(tài)0.9° 0.9°/1.8°細(xì)分驅(qū)動(dòng)器工作在5細(xì)分狀態(tài)0.36° 0.9°/1.8°細(xì)分驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)0.18° 0.9°/1.8°細(xì)分驅(qū)動(dòng)器工作在20細(xì)分狀態(tài)0.09° 0.9°/1.8°細(xì)分驅(qū)動(dòng)器工作在40細(xì)分狀態(tài)0.045° 從上表可以看出:步進(jìn)電機(jī)通過細(xì)分驅(qū)動(dòng)器的驅(qū)動(dòng),其步距角變小了,如驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)時(shí),其步距角只為‘電機(jī)固有步距角’的十分之一,也就是說:‘當(dāng)驅(qū)動(dòng)器工作在不細(xì)分的整步狀態(tài)時(shí),控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖,電機(jī)轉(zhuǎn)動(dòng)1.8°;而用細(xì)分驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)時(shí),電機(jī)只轉(zhuǎn)動(dòng)了0.18°’,這就是細(xì)分的基本概念。細(xì)分功能完全是由驅(qū)動(dòng)器*精確控制電機(jī)的相電流所產(chǎn)生的,與電機(jī)無關(guān)。